|
Systems with Nonzero Torques |
 |
In the remainder of this chapter we will analyze systems in which there are external torques applied to the system, which
can change the angular momentum of the system.
|
|
|
|
|
|
|
|
System: Stick
Surroundings: Your hand (pulling); ice (negligible effect)
Momentum Principle:
Angular Momentum Principle about center of mass:
Component into page (− z direction):
In vector terms,  points into the page, corresponding to the fact that the angular velocity points into the page and is increasing.
|
|
|
|
|
|
|
|
 In Chapter 9 we showed that the moment of inertia I around the center of mass of a uniform rod of mass M and length L is ML2/12; L = 1 m here.
|
|
|
Alternative Analysis—Taking Torques Around the End of the Stick
A System: Stick
Surroundings: Your hand (pulling); ice (negligible effect)
Momentum Principle unchanged, which gives this:
Angular Momentum Principle about location
A:
Component into page (−
z direction):
This agrees with our analysis where we took torques about the center of mass of the stick, but the details of the calculation
are rather different. It is a good check on an analysis involving the Angular Momentum Principle to do the problem for two
different choices of the location about which to calculate the net torque.
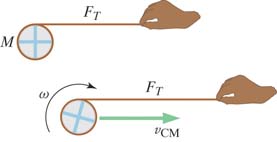
A Puck with String Wound Around It
Wrap a string around the outside of a hockey puck. Then pull on the string with a constant tension
FT (Figure
11.52). The puck has mass
M and radius
R. Assume that friction with the ice rink is negligible. Evidently
dvCM/dt =
FT/M.
|
|
|
|
|

|
Figure 11.52 |
Wrap a string around a hockey puck, then pull it along the ice with negligible friction, with a constant tension FT.
|
|
|
|
|
The torque about the center of mass is RFT, into the page (down into the ice).
The rotational angular momentum is (MR2/2)ω, into the page (down into the ice). Therefore (MR2/2)dω/dt = RFT, and we have dω/dt = (2FT)/(MR).
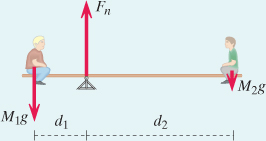
Equilibrium
If the net torque on a system is zero, its angular momentum is constant. Conversely, if we know that the angular momentum
is not changing, we can conclude that the net torque must be zero. For example, if a system is in equilibrium, not only must
the net force on the system be zero; the net torque must also be zero. This allows us to make conclusions about the individual
torques whose vector sum is zero.
|
|
|
|
|
|
|
|
System: The two persons and the seesaw
Surroundings: Earth and axle
Principle: The Momentum Principle 
Since the system is not moving, the momentum of the system isn't changing, so  , and therefore the net force  . Consider the y forces:
It isn't surprising to find that the axle must exert an upward force equal to the combined weights of the two persons. Next
we use a different principle to determine where the person on the right should sit.
Principle: The Angular Momentum Principle 
Since the angular momentum isn't changing,  about any point whatsoever, and therefore  about any point whatsoever. It is convenient to choose point A to be at the location of the axle, because then the upward force of the axle exerts no torque about point A. Consider the z component of the net torque:
|
|
|
|
|
|
|
Further Discussion
This analysis would also be valid if the seesaw were rotating at a constant angular velocity, because it would still be the
case that the angular momentum would not be changing, and the net torque would be zero.
This is an example of a category of “statics” problems in which it is necessary to consider both the Momentum Principle and
the Angular Momentum Principle in order to carry out a complete analysis.
|
| Copyright © 2011 John Wiley & Sons, Inc. All rights reserved. |